الکتروموتورها یا همان موتورهای الکتریکی در بیشتر تجهیزات متحرک مورد استفاده قرار میگیرند. این موتورها با توجه به کاربردی که دارند باید از جنبههای مختلف کنترل شوند. کنترل دور الکتروموتور، یکی از مهمترین جنبههای کنترل آنها است؛ اما برای تنظیم سرعت موتور الکتریکی باید چکار کرد؟ در هر یک از انواع الکتروموتورها چگونه میتوان دور آن را کنترل است؟ در اینجا ما به همه سوالات شما پاسخ خواهیم داد، پس تا آخر همراه ما باشید.
کنترل دور الکتروموتور
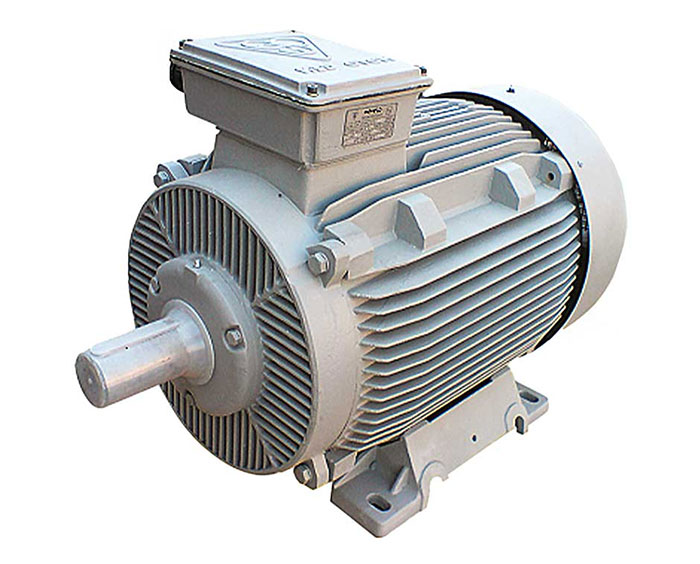
الکتروموتور چیست؟ الکتروموتور یک نوع ماشین الکتریکی است که وظیفه آن، تبدیل انرژی الکتریکی به مکانیکی است. موتورهای الکتریکی در حالت به سه نوع جریان مستقیم (DC)، جریان متناوب (AC) و یونیورسال تقسیم میشوند. هر کدام از این موتورها هم دارای دستهبندی خاص هستند؛ موتورهای جریان مستقیم را میتوان به سه نوع سری، شنت و کمپوند اضافی تقسیم کرد و موتورهای جریان متناوب دارای دو نوع اصلی تکفاز و سه فاز هستند.
کنترل دور الکتروموتور یا به عبارتی دیگر تنظیم سرعت موتور الکتریکی، بسته به کاربردی که موتور در سیستمهای قدرت دارد، دارای یک روش کنترلی است. تنظیم سرعت الکتروموتور، کارهای صنعتی را آسانتر میکند و در انرژی مصرفی صرفهجویی خواهد شد. اما چگونه دور موتور را کم کنیم؟ در ادامه نحوه کنترل سرعت موتورهای مختلف آورده شده است.
روش های کنترل و تنظیم دور موتور الکتریکی
برای تنظیم دور الکتروموتور باید با توجه به نوع آن روش مناسب را انتخاب کرد. در هر یک از موتورهای جریان مستقیم و جریان متناوب روشهای مختلفی وجود دارد که در ادامه به آنها اشاره خواهیم کرد.
3روش کنترل دور الکتروموتور جریان مستقیم
سه روش کم کردن دور موتور الکتریکی جریان مستقیم وجود دارد:
تنظیم سرعت با کنترل شار میدان
یک روش متداول برای کنترل دور موتور الکتریکی جریان مستقیم است. در این روش جریان از مقدار پایه بیشتر خواهد شد. کنترل شار میدان یک روش ساده و ارزان است که باعث تغییرات زیاد در تلفات موتور نمیشود.
تنظیم سرعت با ولتاژ آرمیچر
در این روش با فرض ثابت ماندن شار در هر قطب، با کم کردن ولتاژ ترمینال، سرعت موتور کم میشود. اگر مقدار شار ثابت باشد، سرعت موتور بهصورت مستقیم با ولتاژ تغییر میکند.
تنظیم سرعت با مقاومت آرمیچر
در یک موتور DC با فرض ثابت بودن شار و ولتاژ ترمینال و همچنین افزایش مقاومت آرمیچر، دور الکتروموتور قابل تنظیم است. برای اینکه شار اثر کمتری داشته باشد، باید یک مقاومت به مدار آرمیچر اضافه کرد.
روشهای کنترل دور الکتروموتور جریان متناوب
برای تنظیم سرعت موتور الکتریکی جریان متفاوت هم روشهای مختلفی وجود دارد. این روشها با توجه به تکفاز و سه فاز بودن موتور میتواند متفاوت باشد.
تنظیم دور با استفاده از تبدیل پتانسیل به فرکانس
یکی از روشهای ساده برای کنترل دور موتور الکتریکی جریان متناوب، ثابت نگهداشتن نسبت پتانسیل به فرکانس است. از این روش در کارخانجات صنعتی استفاده میشود. این روش مزیتهای زیادی مانند راحت بودن، راهاندازی آسان و ماندگاری قابل قبول است. اما، این نوع تنظیم دور الکتروموتور برای مصارف نیازمند به پاسخ سریع اصلا مناسب نیست.
تنظیم سرعت با اینورتر کنترل دور موتور
در گذشته از موتورهای جریان مستقیم یا همان DC برای بارهایی که به کنترل سرعت دقیقی نیاز داشتند، استفاده میکردند. اما استفاده از این نوع موتورها معایبی داشت؛ بههمین دلیل استفاده از موتورهای جریان مستقیم بیشتر شد. بهترین روش برای کنترل دور موتور تکفاز و سه فاز استفاده از اینورتر یا درایو الکتروموتور است.
اینورتر دور الکتروموتور را بهصورت پیوسته از صفر تا چند برابر دور نامی آن تنظیم خواهد کرد. یکی از مزایای استفاده از اینورتر، موتور الکتریکی را بهصورت کنترلشده و نرم کار خود را شروع و متوقف میکنند. با درایو الکتروموتور میتوانید زمان شروع و متوقف کردن را با دقت بسیار زیادی تنظیم کرد. این زمان میتواند در حد چند ثانیه یا در حد چند ساعت باشد.
نحوه عملکرد اینورتر برای کنترل سرعت الکتروموتور
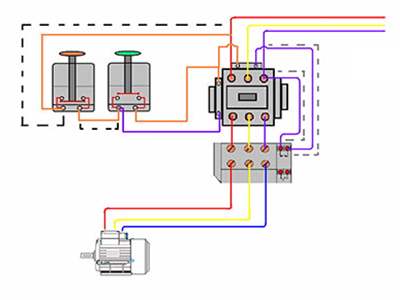
اینورتر مابین موتور و منبع تغذیه قرار میگیرد. برق با ولتاژ جریان متناوب که ولتاژ و فرکانس مقدار ثابتی دارد وارد اینورتر خواهد شد. ولتاژ وارد شده توسط درایو الکتروموتور به ولتاژ DC که دارای ریپلهایی است، تبدیل میکند. در مرحله بعد ریپلهای ایجاد شده به کمک یک مدار میانی حذف شده و در نهایت دارای یک ولتاژ DC میشود.
در مرحله آخر، کار اینورتر این است که ولتاژ DC به یک ولتاژ AC با فرکانس و ولتاژ متغیر تغییر میدهد که شخص کاربر میتواند براساس تنظیمات خود اینورتر، فرکانس و ولتاژ خروجی به موتور تنظیم کند و به این روش کنترل سرعت الکتروموتور را در اختیار خواهیم داشت. برای کنترل دور با اینورتر چه روشهایی وجود دارد؟
برای کنترل دور الکتروموتور توسط اینورتر دو روش اصلی شامل روش کنترل اسکالر و روش وکتور وجود دارد. برای اجرای هر یک از این روشهای باید مراحلی خاصی را انجام داد که در ادامه به آنها خواهیم پرداخت:
روش اسکالر
در صنعت این روش را با نامهای کنترل فرکانس V/F، مدولاسیون عرض پالس یا VVVF هم میشناسند. برای استفاده از این روش ابتدا ولتاژ AC به ولتاژ DC تبدیل خواهد شد، سپس به کمک مدولاتور، دنباله پالسی از ولتاژ با فرکانس متغیر به موتور ارسال میشود. در این روش V/F مقدار ثابتی است؛ پس با بالا رفتن فرکانس ولتاژ هم افزایش خواهد یافت.
در روش اسکالر هیچ کنترلی بر روی گشتاور وجود ندارد و ولتاژ و فرکانس هستند که بهصورت غیرمستقیم موتور را کنترل میکنند. به علت اینکه از هیچ فیدبکی استفاده نمیشود، کنترلی بر روی سرعت و موقعیت شفت وجود ندارد. در روش اسکالر احتمال خطا بیشتر است؛ چراکه پاسخ کند و عملکرد تریستورها مقدار دقت را کاهش میدهد.

روش وکتور
به دلیل معایبی که در روش اسکالر وجود دارد، روش وکتور میتواند جایگزین خوبی برای آن باشد. در روش اسکالر الکتروموتور توسط متغیرهای غیرحقیقی کنترل میشوند؛ اما، در این روش سعی شده است از متغیرهای حقیقی برای کنترل دور الکتروموتور استفاده شود. برای تنظیم سرعت موتور الکتریکی در روش ویکتور از متغیرهای شار و گشتاور استفاده شد.
برای اینکه بتوانید مقدار شار و گشتاور را کنترل کنید، باید بتوانید جریان را کنترل کنید؛ اما در الکتروموتورها یک مشکل اساسی وجود دارد؛ روی جریان کنترل سیستمی وجود ندارد. جریان یک الکتروموتور تابعی از جریان استاتور است؛ پس با استفاده از محاسبات پیچیده ریاضی، مقدار شار قابل محاسبه خواهد بود. در نهایت با استفاده از فیدبک میتوان کنترل دور الکتروموتور را تنظیم کرد. در این روش مقدار خطا تا حد زیادی برابر صفر است.
نتیجهگیری
در این مقاله به کنترل دور الکتروموتور پرداخته شد. در ابتدا الکتروموتور به سه دسته اصلی یعنی جریان مستقیم، جریان متناوب و یونیورسال دستهبندی شد. هر کدام از این دستهها دارای زیر دسته مربوط به خود هستند. بهدلیل محدودیتهایی که موتورهای جریان مستقیم دارند، از موتورهای جریان متناوب بیشتر استفاده میشود.
تنظیم سرعت الکتروموتور از اهمیت زیادی برخوردار است که در اینجا به مهمترین روش کنترل الکتروموتور سه فاز و تکفاز یعنی استفاده از اینورتر پرداخته شد. برای کنترل دور موتور الکتریکی دو روش تبدیل پتانسیل به فرکانس و تنظیم به کمک اینوتر وجود دارد. برای اینکه بتوانید دور موتور را به کمک اینوتر تنظیم کنید، روش وکتور بهتر از اسکالر است و شما میتوانید از آن استفاده کنید.